The final trials and final demonstration of the ROBO-SPECT European project have been successfully concluded on 15 July 2016 at the Egnatia Motorway Tunnels in Metsovo (Greece). The ROBO-SPECT consortium demonstrated the autonomous operation of the system in detecting cracks and defects, the automatic navigation/movement of the robotic system, the 3D tunnel creation (local and global) as well as the automated wall approach (with the robotic arm and crane) to perform ultrasonic measurements of cracks. The Decision Support System and Ground Control Station were also demonstrated the former performing the structural assessment of the tunnel after collection of the results and the latter defining the mission, providing real-time information from the tunnel, providing capabilities for annotations on the collected images and controlling the overall mission.
The final trials and final demonstration of the ROBO-SPECT European project have been successfully concluded on 15 July 2016 at the Egnatia Motorway Tunnels in Metsovo (Greece). The ROBO-SPECT consortium demonstrated the autonomous operation of the system in detecting cracks and defects, the automatic navigation/movement of the robotic system, the 3D tunnel creation (local and global) as well as the automated wall approach (with the robotic arm and crane) to perform ultrasonic measurements of cracks. The Decision Support System and Ground Control Station were also demonstrated the former performing the structural assessment of the tunnel after collection of the results and the latter defining the mission, providing real-time information from the tunnel, providing capabilities for annotations on the collected images and controlling the overall mission.
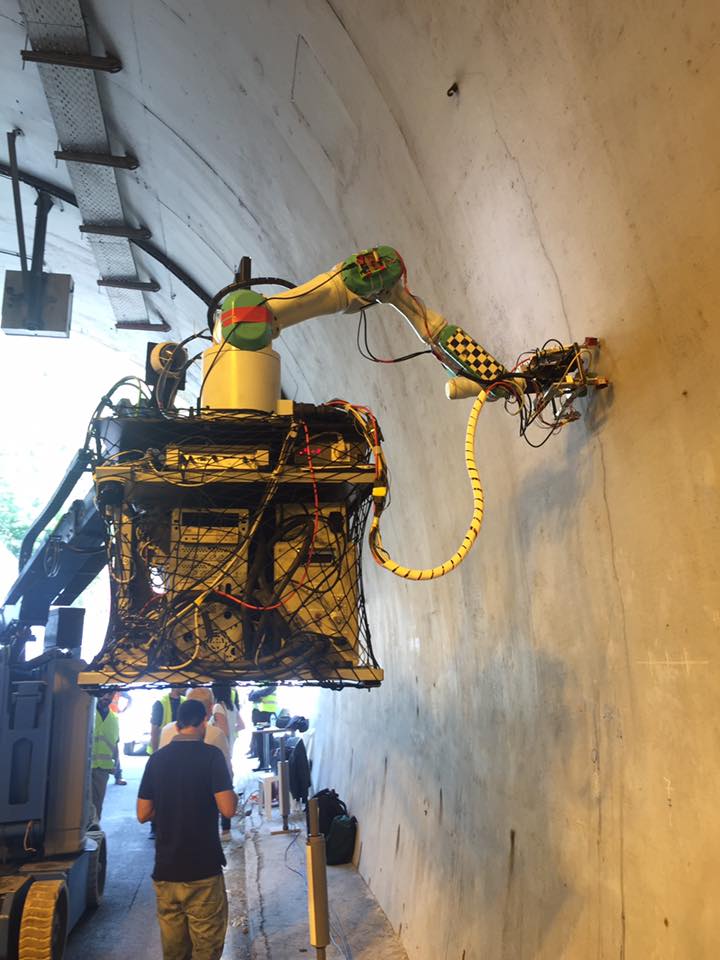
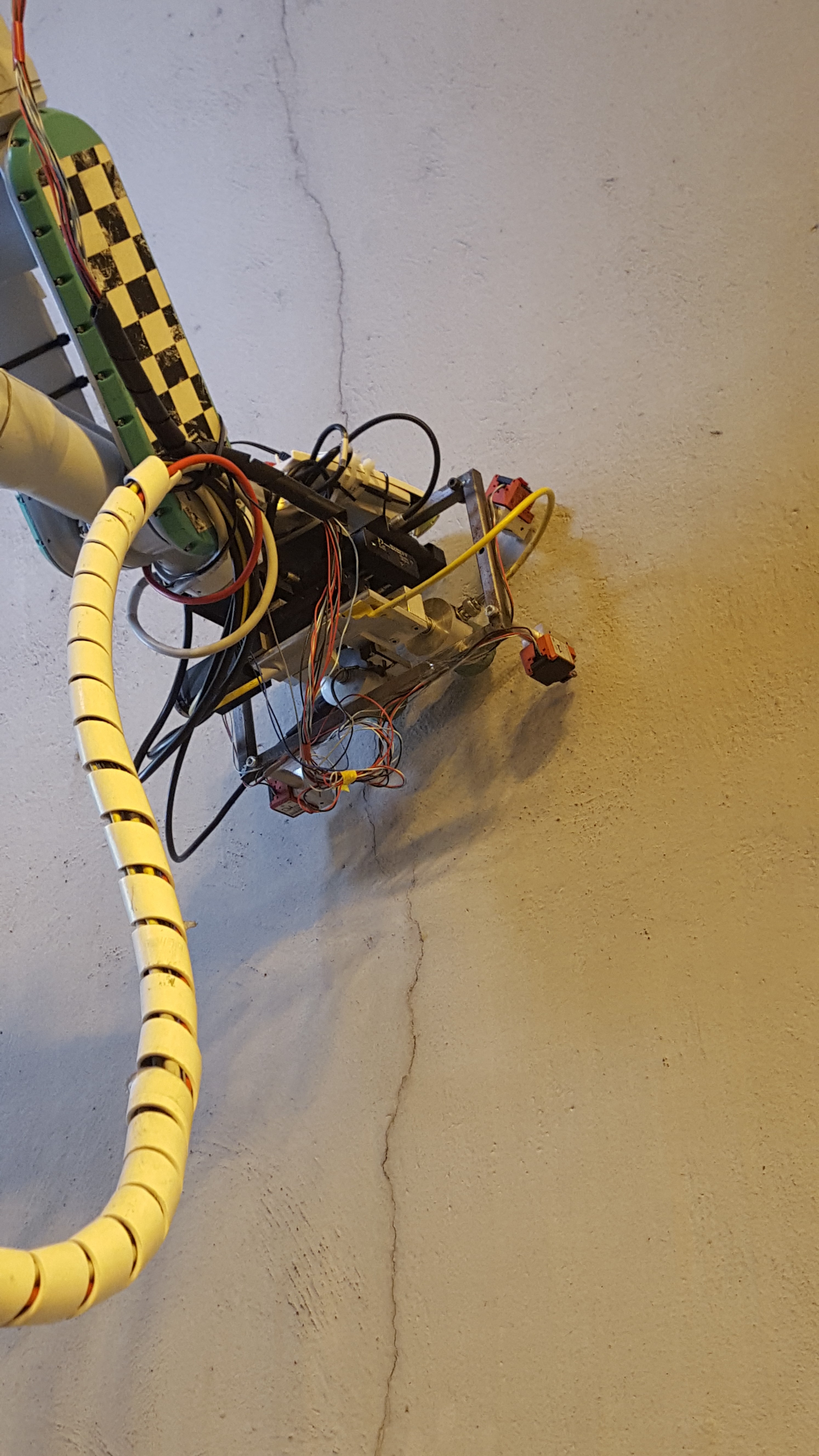
Several scenarios were demonstrated, by defining and controlling the automatic inspection mission locally and remotely (from the control center of the Egnatia tunnels) while the robot was autonomously executing the inspection inside the Metsovo tunnel. The DSS demonstration followed based on the collected results. Fully automated robotic missions were executed, with the robotic system scanning autonomously for cracks, calculating their 3D positions in global space and controlling the vehicle, crane and on-board robotic-arm to contact the tunnel wall and perform ultrasonic measurements of the cracks’ width and depth as well as surface velocity measurements on tunnel wall.
Congratulations to all involed partners!