ΕΠΙΒΛΕΠΟΝΤΕΣ:
Καθηγητής Νικόλαος Ουζούνογλου (210-772-3556, nuzu@cc.ece.ntua.gr)
Ερευνητής Α’ ΕΠΙΣΕΥ Δρ. Άγγελος Αμδίτης (210-772-2398, a.amditis@iccs.gr)
ΘΕΜΑ 2: Ανάπτυξη αλγορίθμων πρόβλεψης πορείας και εντοπισμού/εκτέλεσης ελιγμού
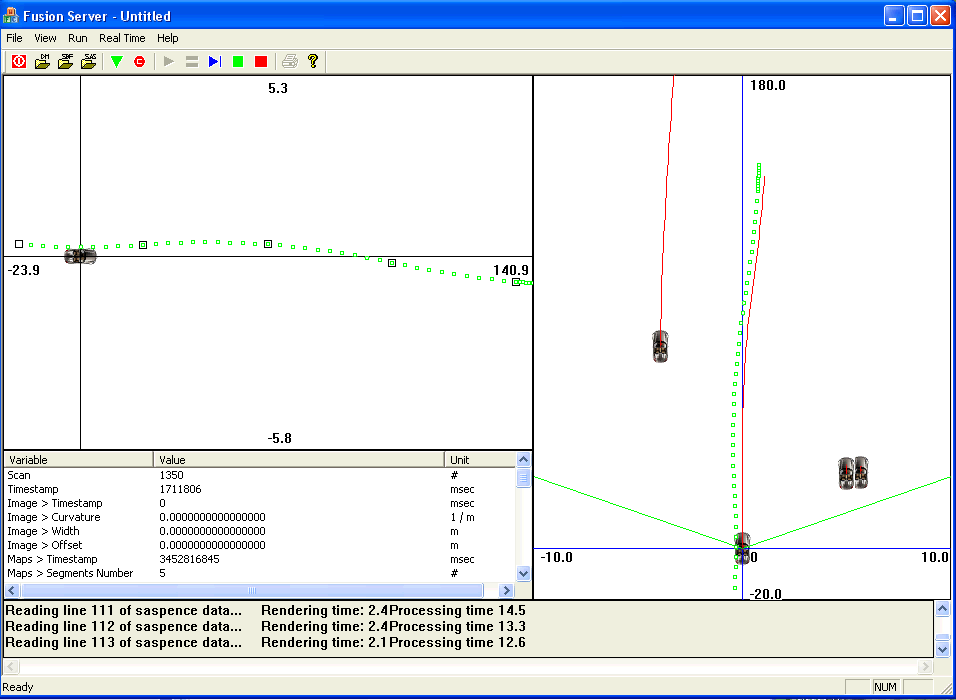
Η πρόβλεψη της μελλοντικής κατάστασης του οχήματος αποτελεί έναν από τους κύριους στόχους των συστημάτων προειδοποίησης σύγκρουσης. Αυτό μπορεί να επιτευχθεί είτε με βάση τη δυναμική κατάσταση του οχήματος που προκύπτει με βάση τους αδρανειακούς αισθητήρες που φέρει, είτε με βάση στατικές πληροφορίες όπως είναι η γεωμετρία του δρόμου, η οποία προέρχεται από τους ψηφιακούς χάρτες, την κάμερα ή το laserscanner. Ο φοιτητής σε αυτή τη διπλωματική καλείται να αναπτύξει:
· Αλγορίθμους για την πρόβλεψης της μελλοντικής πορείας του δρόμου με βάση πολλαπλές πηγές πληροφορίας, μεταξύ των οποίων κάμερα, ψηφιακοί χάρτες και αδρανειακοί αισθητήρες του οχήματος.
· Αλγοριθμους για την διόρθωση της πορείας του οχήματος με βάση διαγράμματα Voronoiκαι καμπύλες NURBS. Η μελέτη θα περιλαμβάνει την ανάπτυξη της κατάλληλης μεθοδολογίας για την εύρεση της βέλτιστης τροχιάς του οχήματος για την αποφυγή εμποδίων ή την εκτέλεση κάποιου συγκεκριμένου ελιγμού.
· Αλγορίθμους αναγνώρισης επικίνδυνων καταστάσεων όπως π.χ. αποχώρηση από τη λωρίδα, προσπέραση, πιθανή σύγκρουση με οχήματα στην ιδία η γειτονική λωρίδα, κατάστασης πυκνής κυκλοφορίας ή μποτιλιαρίσματος (stopandgosituations).
Η μαθηματική μοντελοποίηση των αλγορίθμων θα περιλαμβάνει φίλτρα Kalman, NURBS, συστήματα ασαφούς λογικής και θεωρία Dempster-Shaferκαι η υλοποίηση θα γίνει σε Matlabή C++. (1 άτομο)
Για πληροφορίες:
Α) Δρ. Μανόλης Τσόγκας, 210-772-1076, mtsog@iccs.gr
B) Δρ. Άγγελος Αμδίτης, 210-772-2398, a.amditis@iccs.gr


